
Md Masudur Rahman
I am interested in Artificial Intelligence, Reinforcement Learning, and Robotics. My work focuses on designing and developing intelligent learning agents capable of making interpretable, critical decisions under uncertain conditions.
Currently, my efforts are concentrated on the issue of generalization in reinforcement learning. I aim to develop algorithms that remain robust against the effects of confounders, with the ultimate goal of using these algorithms to solve real-world tasks.
I am a Ph.D. Candidate in the department of Computer Science at the Purdue University. My advisor is Professor Yexiang Xue.
I completed my M.S. from the department of Computer Science at the University of Virginia in 2018. Before joining the University of Virginia, I worked as a Lecturer in the Computer Science and Engineering department at the BRAC University. I completed my B.Sc. in Computer Science and Engineering from Bangladesh University of Engineering and Technology (BUET) in 2013.
[Home] [Research] [Publications] [Teaching] [Mentoring] [Service] [CV] [Google Scholar]
Research
My research stands at the intersection of theoretical RL and practical applications, striving to bridge the gap between the two. The challenges in real-world applications of RL include dealing with imprecise state representations and the environment's shifts in data distribution. My objective is to leverage RL theory's strengths to address these challenges, creating algorithms that are grounded in realistic assumptions and are adaptable to shifting data distributions.


Reinforcement Learning in the Presence of Confounders
The project develops advanced policy optimization algorithms to address the challenges of deploying reinforcement learning agents in complex real-world environments, focusing on improving their generalization to new, unseen situations.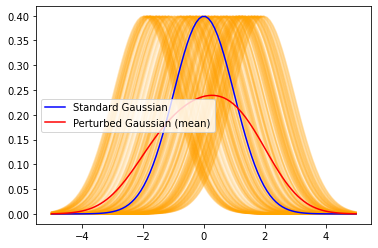
Robust Policy Optimization for Efficient Deep Reinforcement Learning
The project aims to enhance deep reinforcement learning by diversifying training datasets and enriching data trajectories. This approach is designed to facilitate the development of robust policies and improve adaptability to new situations with fewer data requirements, enabling effective application across diverse and dynamic environments.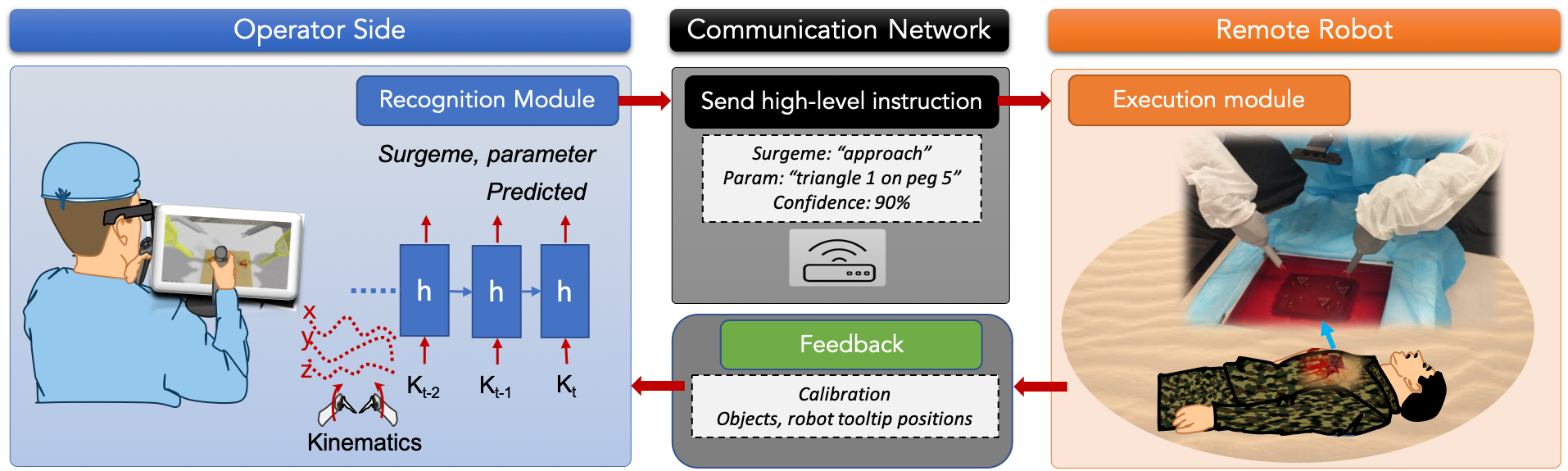
Advancing Robotic Surgery with Semi-autonomous Teleoperation
The project aims to advance the application of machine learning in safety-critical systems, focusing on developing a semi-autonomous teleoperated robotic surgery system to overcome the limitations of data scarcity.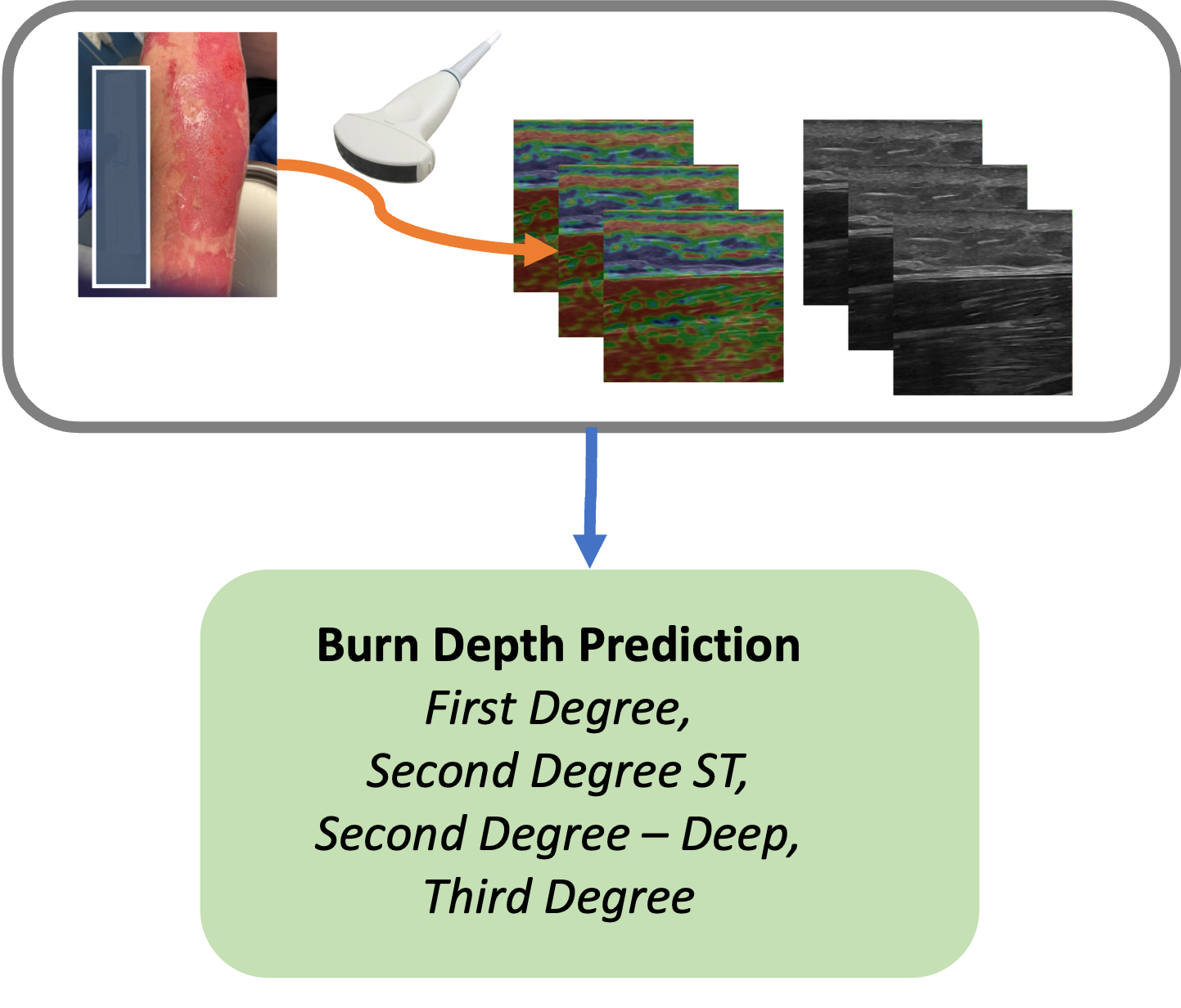
Automated Burn Diagnostic System for Healthcare (AMBUSH)
Publications
[C15] Natural Language-based State Representation in Deep Reinforcement Learning. [pdf]
[W4] Natural Language-based State Representation in Deep Reinforcement Learning. [pdf]
[W3] Accelerating Policy Gradient by Estimating Value Function from Prior Computation in Deep Reinforcement Learning. [pdf]
[W1] Finding Similar Projects in GitHub using Word2Vec and WMD. [slides]
Teaching
Teaching Assistant- Statistical Machine Learning (Graduate), Spring 2021, Purdue University
- Web Information Search And Management (Undergraduate), Fall 2020, Purdue University
- Introduction to Information Retrieval (Graduate), Fall 2018, University of Virginia
- Data Science for Software Engineering (Graduate), Spring 2016, University of Virginia
- Theory of Computation (Undergraduate), Fall 2015, University of Virginia
- Computer Architecture (Undergraduate), Fall 2015, Spring 2016, Fall 2018, University of Virginia
- Data Structure (Undergraduate), Fall 2014, Spring 2015, Summer 2015, BRAC University, Bangladesh
- Digital Logic Design (Undergraduate), Summer 2015, BRAC University, Bangladesh
- Introduction to Computer (Undergraduate), Fall 2014, Spring 2015, BRAC University, Bangladesh
Mentoring
I am fortunate to work with following students in various capacities.- Zachery Peter Berg (Undergrad - Spring 2021, Grad, Purdue University, 2021-2022)
Topic: Reinforcement Learning - Brian Yifei Sun (Undergrad, Purdue University, 2021)
Topic: Reinforcement Learning - Chao Liu (Ph.D Student, Chongqing University, China, 2018)
Topic: Recommending GitHub Project for Developer Onboarding.
Paper: IEEE Access 2018 - Jed Barson (Undergrad, University of Virginia, 2018)
Topic: Code Search
Paper: MSR 2018
First appointment after graduation: Software Engineer at Cisco. - Eliza Yixuan Nie (Undergrad, University of Virginia, 2017)
Topic: GitHub Project Search
First appointment after graduation: Software Engineer at Facebook.
Service
Conference Reviewer- ICML: 2024, 2023, 2022 (Outstanding reviewer, Top 10%)
- ICLR: 2024
- NeurIPS: 2023, 2022
- UAI: 2024, 2023
- AAMAS: 2024, 2023, 2022
- AISTATS: 2023
- ECML-PKDD: 2023, 2022, 2021
- ICMLA: 2021
- ICRA: 2021
- RO-MAN: 2021
- IEEE Robotics and Automation Letters (RA-L) 2024, 2023
- Military Medicine 2022
- IEEE Access 2018
- ICLR: 2023
- NeurIPS: 2019, 2020, 2021
- ICML: 2019, 2021
- IJCAI: 2019, 2021
- UAI: 2020, 2021
- AISTATS: 2020
- AAMAS: 2021
- KDD-DMAIC (workshop): 2019
- VLDB Journal 2019
[Home] [Research] [Publications] [Teaching] [Mentoring] [Service] [CV] [Google Scholar]